국내 연구진이 토마토를 움켜쥐어 보고 신선도와 단단함의 정도 등을 정확히 측정할 수 있는 '로봇손'을 개발했다.
한국전자통신연구원(ETRI)은 유연 멀티모달 센서를 활용해 다양한 물체의 형상, 물성 등을 정확하게 인지하고 제어할 수 있는 지능형 로봇 그리퍼(집게)를 개발했다고 5일 밝혔다. 유연 멀티모달 센서는 다양한 정보를 공유하고 종합하는 센서다.
센서는 감지소재와 전극 사이의 간극을 미세하게 조절해 압력 및 굽힘센서의 감지 범위와 민감도를 선택적으로 조절하게 개발됐고 이를 통해 로봇 그리퍼는 물체에 가해지는 압력과 그리퍼의 굽힘 정도를 동시에 감지해 물체의 단단한 정도도 정확히 판단할 수 있다.
연구진은 촉각센서가 집적된 지능형 로봇 그리퍼가 다양한 크기와 물성을 갖는 토마토 11종을 98.78%의 정확도로 구분했다고 설명했다. 이를 통해 시간에 따라 완숙 여부가 달라지는 토마토의 숙성도까지 실시간 선별해낼 수 있게 됐다. 또 그리퍼는 어떤 물체를 집는지 즉각적인 피드백을 통해 힘을 조절하고 물체를 파지하는 시점을 결정하는 등 사람과 같은 섬세한 움직임을 재현해낸다.
내구성 면에서 보호층과 인터페이스 공정을 최적화해 1만회 이상 굽힘과 압력을 반복해도 문제 없이 작동했고 저온 및 고습 환경에서의 신뢰성도 검증됐다.
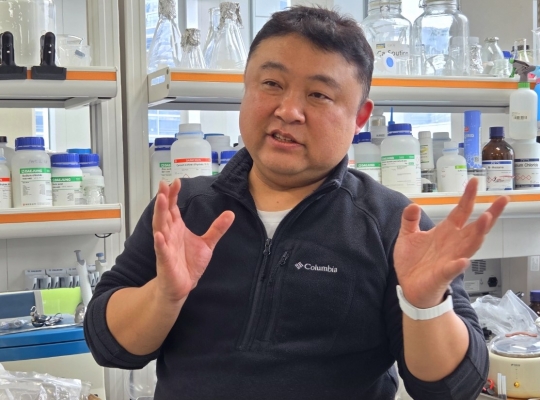
김혜진 ETRI 지능형부품센서연구실 책임연구원은 "개발한 촉각센서는 로봇 그리퍼에 다양한 촉각 기능을 부여해 자동화 라인 및 협업 로봇 분야에서 혁신적인 응용 가능성을 제시한다"고 말했다.
연구진은 현재 압력과 굽힘을 감지하는 2종 센서에 더해 온·습도센서, 관성센서, 거리감지센서 등을 하나의 센서 플랫폼으로 통합하는 기술을 개발할 예정이다.
Copyright @ NEWSTREE All rights reserved.