전기자동차 주행 안정성을 높이는 '물리적 인공지능(AI) 기반 차량 상태추정 기술'이 개발됐다.
대구경북과학기술원(DGIST) 로봇 및 기계전자공학과 남강현 교수 연구팀은 중국 상해교통대학교, 일본 도쿄대학교와 함께 전기차의 주행 상태를 실시간 정밀 추정하는 '물리적 AI 기반 차량 상태추정 기술'을 개발했다고 11일 밝혔다. 이 기술은 전기차의 핵심제어 성능을 높이고 자율주행차의 안정성을 향상시킬 수 있는 기술로 평가받고 있다.
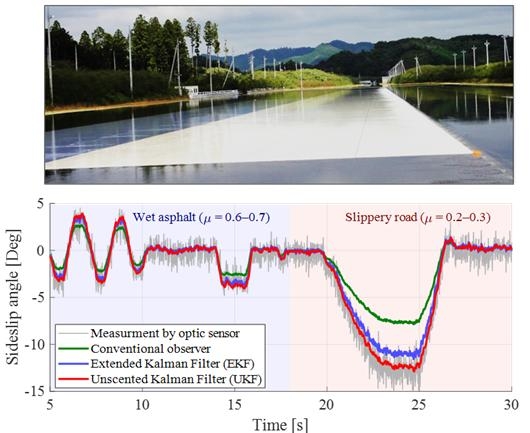
전기차가 급선회하거나 미끄러운 노면을 달릴 때 차량이 옆으로 얼마나 미끄러지는지 나타내는 '측방향 미끄럼각(Sideslip Angle)'은 안전한 주행을 위해 반드시 필요한 핵심정보다. 그러나 이 값은 차량 내부센서로 직접 측정이 어렵기 때문에 그동안 완성차업체들은 복잡한 물리 모델로 추정하거나, 간접적인 계산을 통해 유추해왔다. 이 방법은 정확도가 떨어지고 다양한 주행 조건에서 분석이 어렵다는 한계가 있었다.
이에 연구팀은 AI와 물리 모델을 융합한 '물리적 AI 기반 추정 기술'을 새로 개발했다. 연구팀은 물리 모델로 설명하기 어려운 비선형 타이어 거동과 주행 환경변화를 보완하기 위해, 물리 기반 타이어 모델과 AI 기반 학습 모델을 함께 활용하는 하이브리드 추정 프레임워크를 구축했다. 이를 통해 차량의 미끄럼각을 기존 방식보다 더 정확하고 빠르게 추정하도록 설계했다. 타이어가 옆으로 미끄러질 때 받는 힘(횡타이어력)을 측정하는 센서 정보와 AI 기반 분석 모델을 결합해 정확도를 대폭 높인 것이다.
연구팀은 실제 전기차 플랫폼 실험에서도 다양한 노면, 속도, 코너링 상황에서 높은 정확도와 강인한 추정 성능을 보였다고 설명했다. 정확한 차량 상태추정 기술은 전기차의 주행 안정성 제어, 자율주행 안전확보, 에너지 효율 최적화 등과 직결되는 핵심기술이다.
남강현 교수는 "물리 모델과 AI를 결합한 새로운 접근을 통해 전기차의 주행 상태를 보다 정밀하고 신뢰성 있게 추정할 수 있게 됐다"며 "이번 연구는 차세대 자율주행·전기차 기술의 핵심 기반이 될 것"이라고 말했다. 또한, "향후 글로벌 자동차 제조사와의 공동연구로 발전시켜 실제 산업 현장에 적용 가능한 기술로 확장해 나가겠다"고 밝혔다.
한국연구재단의 지원을 받아 진행된 이번 연구결과는 세계적인 학술지 'IEEE Transactions on Industrial Electronics'에 게재됐다.
Copyright @ NEWSTREE All rights reserved.