국내 연구팀이 개미떼처럼 움직이는 마이크로봇을 개발했다. 이 봇들은 함께 일정한 움직임을 반복하면서 장애물을 치우거나 막힌 혈관을 뚫어주는 등 다양한 용도로 활용이 가능하다.
위정재 한양대 유기나노공학과 교수팀은 자기력으로 움직이며 다양한 작업을 수행할 수 있는 군집 마이크로봇(microrobot swarms)을 개발했다고 20일 밝혔다.
수백 혹은 수천개씩 움직이는 마이크로봇은 단위 로봇이 수행하기 어렵거나 시간이 오래 걸리는 작업을 효율적으로 해낼 수 있다. 또 일부 마이크로봇이 제대로 실행되지 않더라도 전체 시스템은 지장없어 임무수행이 가능해 안정성이 뛰어나다는 장점도 있다.
이 마이크로봇은 가로세로 300마이크로미터(㎛), 높이 600㎛인 직육면체 모양이다. 지금까지 개발된 마이크로봇은 구형으로 만들어졌지만 이번에 개발된 마이크로봇은 자기력이 강하게 작용하도록 접촉면적이 넓은 직육면체로 디자인됐다.
마이크로봇에는 강자성 네오디뮴-철-붕소(NdFeB) 입자가 내장돼 있어 자기장을 통해 움직이면서 다른 마이크로봇들과 상호작용할 수 있다. 연구팀은 자석을 회전시켜 만든 외부 자기장을 이용해 로봇 내부 자석이 자성을 띠는 각도를 조절해 군집 로봇의 움직임을 제어해냈다.
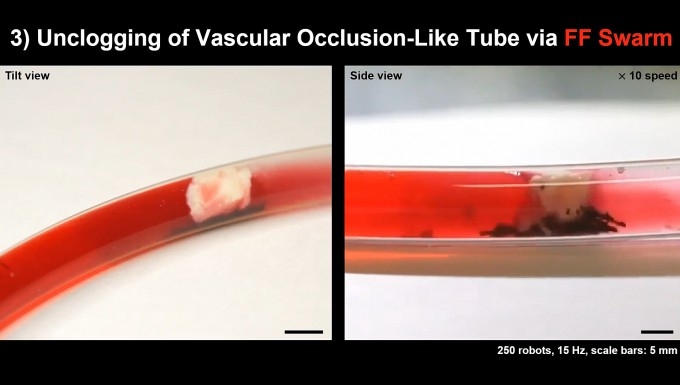
연구팀은 실험을 통해 군집 마이크로봇이 단위 봇보다 약 350배 무거운 물체를 운반하는 데 성공했으며, 장애물을 밀어 넘어뜨리거나 로봇 높이보다 5배 높은 장애물을 뛰어넘는 임무도 성공했다고 밝혔다. 특히 이 봇은 액체속에서도 원활히 작동했다. 알약을 감싼 채 물을 건너 운반하는 것도 가능했다. 동맥을 모사한 얇은 관을 가로막고 있는 이물질을 제거하는 데도 성공해 앞으로 동맥경화증, 협심증 등을 치료하는데도 활용될 수 있을 전망이다.
위정재 교수는 "각 봇의 모양과 자기적 특성이 균일하기 때문에 효율적 비용으로 대량 생산이 가능하다"며 "향후 상용화 가능한 수준까지 개발됐을 때, 즉시 산업계와 의료계에 적용할 수 있을 것"이라고 말했다. 이어 "아직 복잡하고 제한된 공간을 탐색할 수 있는 능력이 부족하다"면서 "향후 연구에서는 로봇이 움직이는 궤적의 실시간 제어 능력 등 로봇의 자율성을 향상시키는 데 초점을 맞출 것"이라고 덧붙였다.
이번 연구결과는 로봇·장치 분야 국제학술지 '디바이스'(Device) 12월 18일자에 게재됐다.
Copyright @ NEWSTREE All rights reserved.