초당 70㎝로 세계최고 속도
국내 연구진이 세계에서 가장 빠른 사족보행 등반로봇을 개발했다.
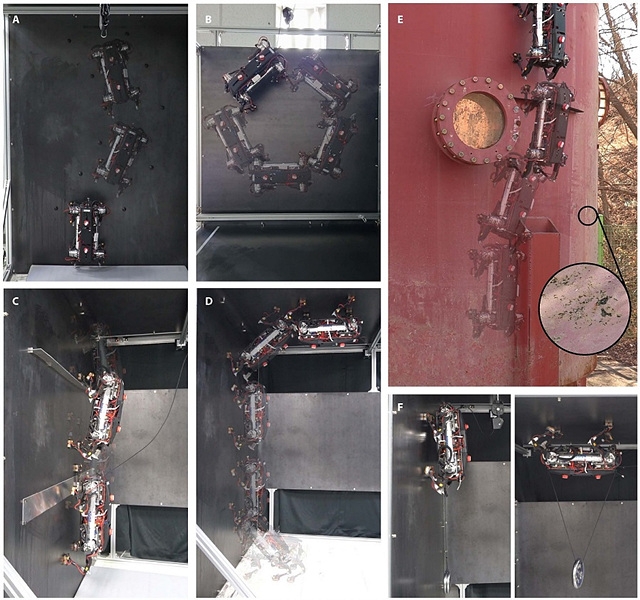
KAIST는 박해원 기계공학과 교수팀이 철로 이뤄진 벽면과 천장을 초당 최대 70㎝속도로 자유롭게 이동하는 사족보행 등반로봇을 개발했다고 26일 밝혔다. 보행형 등반로봇으로는 세계최고 속도다. 해당 연구는 국제학술지 '사이언스 로보틱스'(Science Robotics) 12월호 표지를 장식했다.
기존에도 벽면을 오르는 로봇은 존재했다. 그러나 이동성과 이동속도 간 딜레마가 있었다. 바퀴나 무한궤도를 장착한 등반로봇은 속도는 빠르지만 단차나 요철이 있는 표면에서 이동하기 어려웠고, 다리를 통해 보행하는 등반로봇은 장애물 지형에서 향상된 이동성을 보였지만 속도가 느렸다.
연구진은 딜레마를 극복하기 위해 전자기력을 조절할 수 있는 영전자석(Electropermanent Magnet)과 탄성체에 자기응답인자를 첨가한 자기유변탄성체(Magneto-Rheological Elastomer)를 이용했다. 그 결과 가벼우면서도 높은 흡착력을 지닌 로봇 발바닥을 개발해 표면의 상태와 상관없이 안정적인 이동성과 이동속도를 확보할 수 있었다.
로봇은 길이 33㎝, 너비 11.9㎝, 높이 13.1㎝에 무게는 8㎏이다. 초속 70㎝의 속도로 직벽을 고속등반할 수 있고 50㎝의 속도로 천장에 거꾸로 매달려 보행할 수 있다. 녹슨 페인트가 덕지덕지 붙은 물탱크 표면도 등반이 가능하며 5㎝정도의 장애물은 손쉽게 지나간다.
중량의 경우 수직방향으로 최대 54.5㎏, 수평방향으로 최대 45.4㎏에 달하는 외력을 견딜 수 있다. 배, 교량, 송전탑, 대형저장고, 건설현장 등 철로 이뤄진 구조물들의 점검·수리·보수에 널리 활용될 것으로 기대되는 이유다.
로봇 개발에 참여한 엄용 KAIST 기계공학과 박사과정은 "이 로봇은 로봇의 활동범위를 2D에서 3D로 확장하는 초석이 될 것"이라며 "조선소와 같은 철제구조물에서 위험하고 힘든 작업을 사람대신 수행할 수 있다"고 말했다.
Copyright @ NEWSTREE All rights reserved.